RODNet — Radar Object Detection
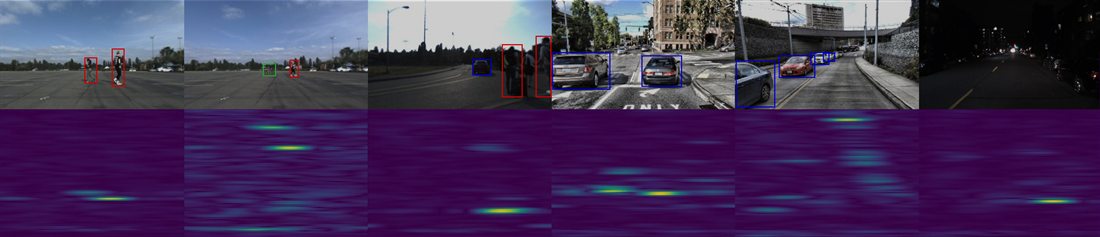
A deep radar object detection network (RODNet) that detects objects purely from processed radar frequency data (range-azimuth heatmaps). Instead of burdensome human labels, RODNet is trained with annotations generated automatically via a camera-radar fusion (CRF) strategy, achieving strong detection without a camera at inference time. Released alongside the CRUW dataset and the ROD2021 Challenge.